
The PWM Controller is the electronics portion of the motor controller.
The block diagram of the PWM Controller is shown below:
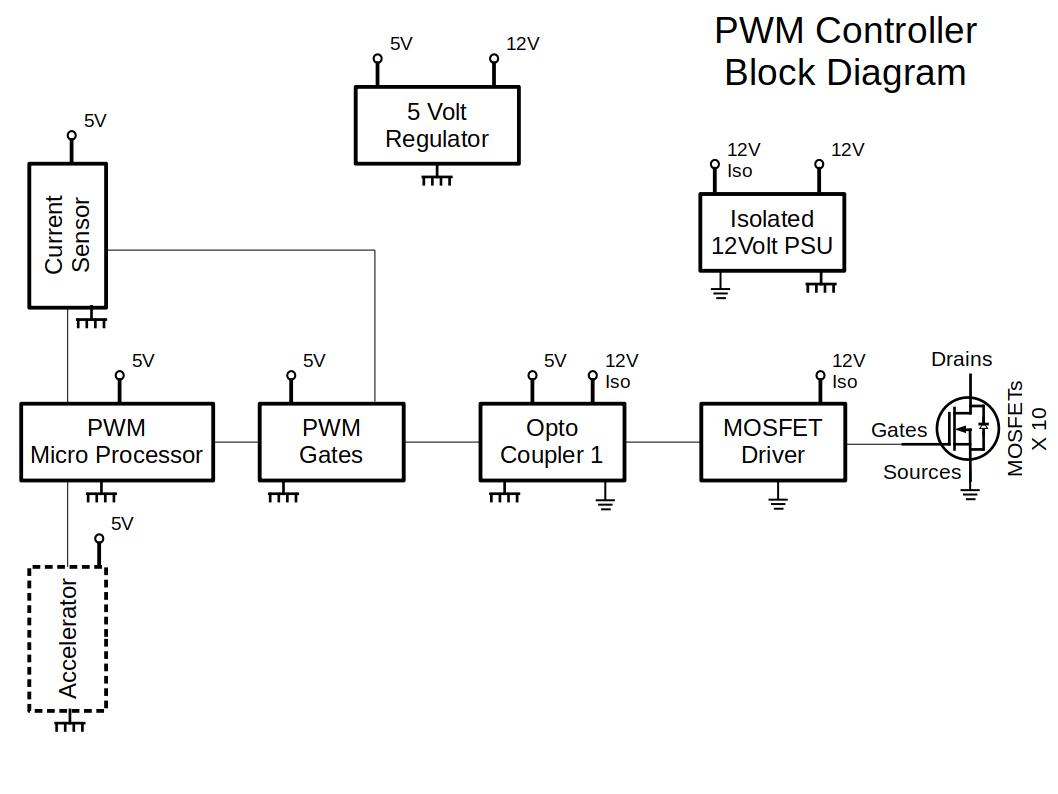
The PWM Controller has two DC power supply regulators, i.e. 5V and an isolated 12V power supply. The Accelerator voltage (0V to 5V) is fed to the PWM Micro Processor. The resulting PWM signal is connected to the Opto-coupler 1 input to provide isolation from the EV high voltage battery. The Opto-coupler 1 output is supplied to the MOSFET gate driver circuit. The PWM pulses are shaped and amplified here to drive the ten MOSFETs. (An optional Temperature sensor is connected to the PWM Micro Processor. If the temperature is too high on the Mosfet Heatsinks, the PWM signals to the Mosfets will be zeroed.) An over current signal is also supplied from the Current Sensor Circuit to the PWM Micro Processor. When over current occurs the PWM signals to the Mosfets are disabled until the Accelerator signal is zero
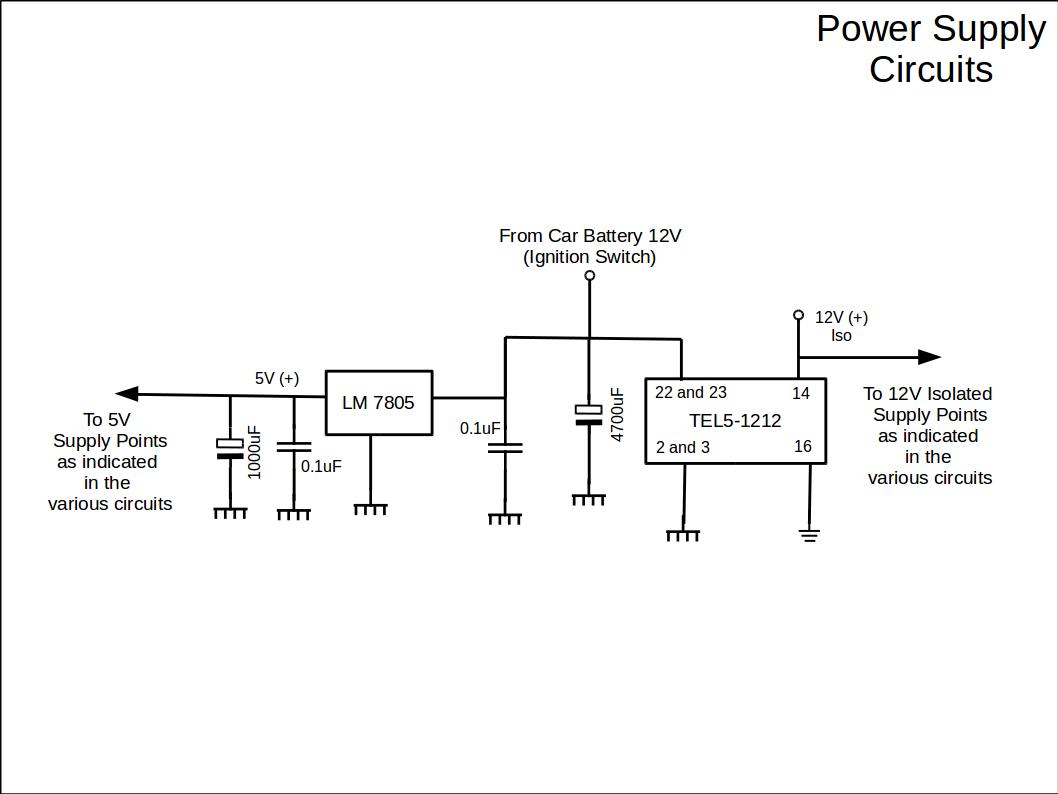
The Power Supply circuit is shown below:
The PWM Micro Processor circuit is depicted in the next picture:
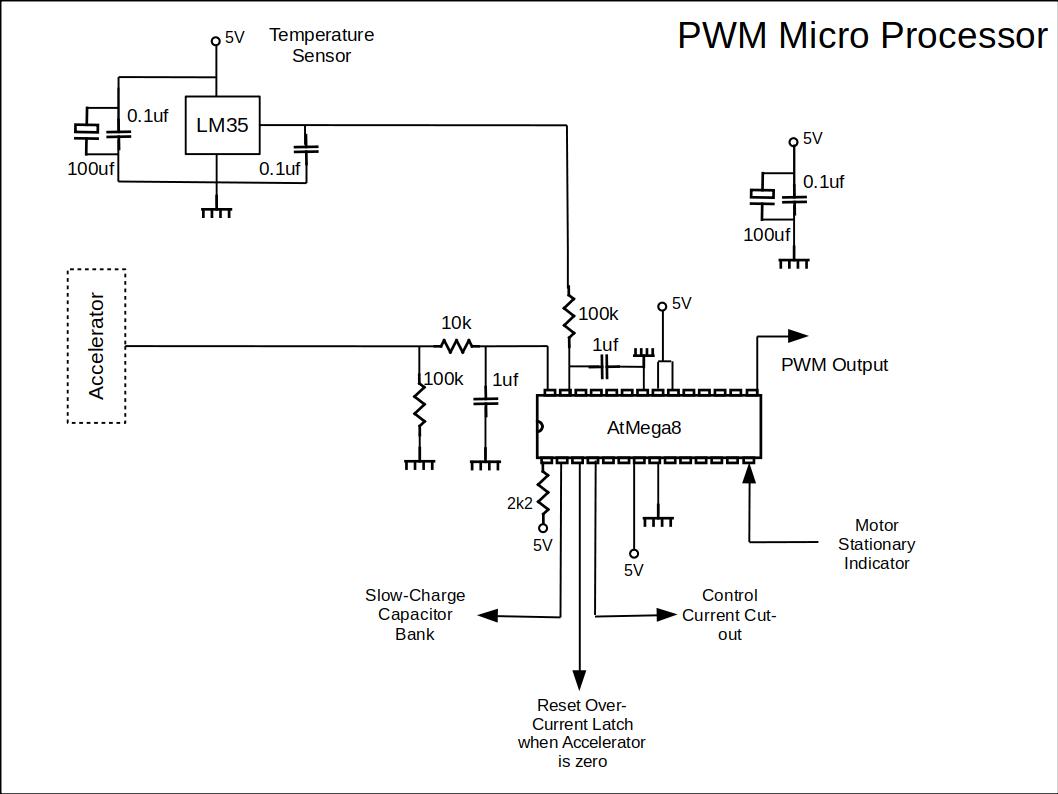
The PWM Micro Processor is based on the ATmega8/328 processor.
The program is written in Basic Language. The listing is given below.
The program was created and compiled with BASCOM AVR and the programmer used is the USB-ISP programmer, both available from www.mcselec.com The software is for a ATmega328 processor.
The heatsink temperature of the MOSFETs is measured with the aid of a temperature sensor IC. The output of this sensor is fed to the PWM Micro Processor which will stop the PWM signals going to the MOSFET gates until the temperature returns to normal. The software can be set for a safe temperature.
The Current Sensor and PWM Gate circuits are shown below:
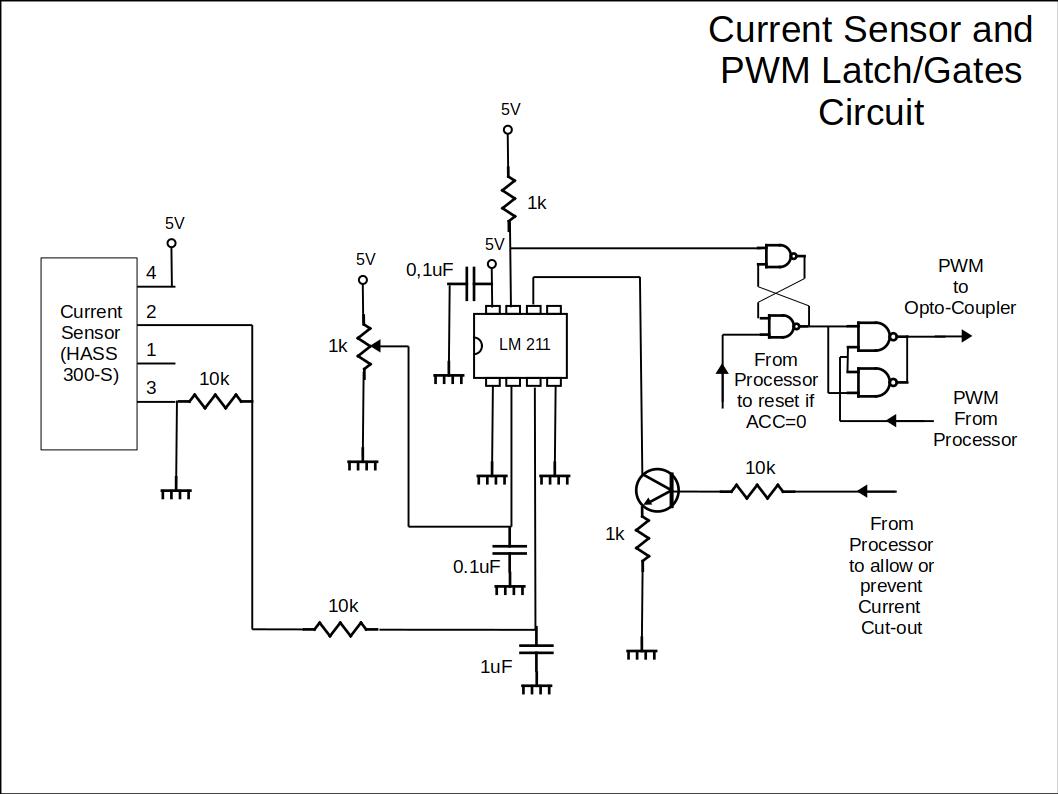
The current sensor measures the Motor Current. The current sensor output is fed to a comparator. The potentiometer is set for the current cut-out value, e.g. 400A. The comparator will trigger the latch if the current exceeds the set limit and the PWM gate will close. (no PWM output until the Accelerator is zero, i.e. reset the latch).
This no-clutch conversion requires large currents when the motor RPM is low. (low EMF). The comparator strobe is used to allow or prevent current limit to occur. No current limit is allowed when the motor is stationary, for a programmable number of seconds, e.g. 5 seconds. This is necessary due to the no-clutch coupling. The motor pulls significant current at startup) – low EMF. Thereafter current limit/cutout is used to protect the MOSFETs from over-current conditions.
The Opto-Coupler and MOSFET driver circuits are shown below:
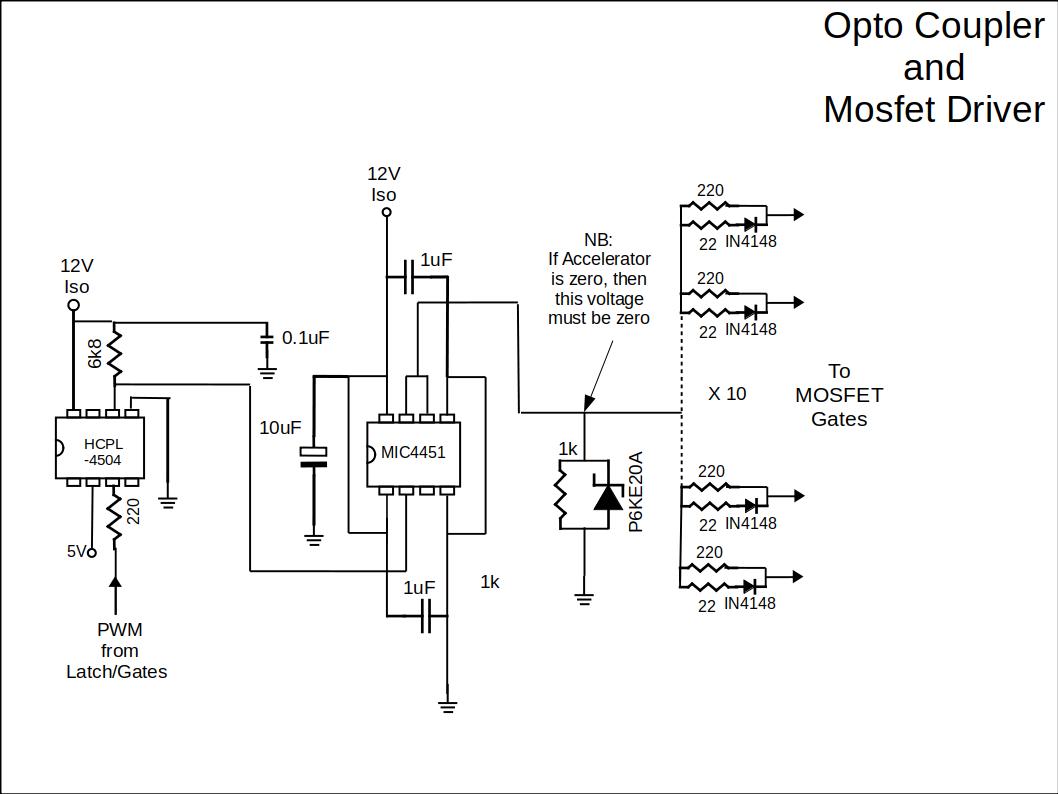
The average Motor voltage is proportional to the PWM ratio. The PWM frequency is 16 kHz. The Motor Current is “smoothed” by the inductance of the Motor to virtually DC. This current is switched by the MOSFETS and the average MOSFET current is proportional to the PWM ratio.
The Mosfet Gate Resistors and Diodes are selected to reduce the “spikes” (ringing) on the Mosfet Drains. The “spikes” are further suppressed by using a Snubber connected to the Mosfet Drains.