
The Accelerator is connected via cable to the Accelerator Pedal. It senses the acceleration requirement and provides an input signal to the Motor Controller. An Accelerator can be made in many ways. Three basic types are most commonly used, namely variable resistor types, magnetic sensor based and optical sensor accelerators.
1. Variable Resistor
A variable resistor, such as a standard slide potensiometer, may be used as shown in the picture below. Although it is extremely simple to construct, these potensiometers have a limited life.
2. Magnetic Sensor
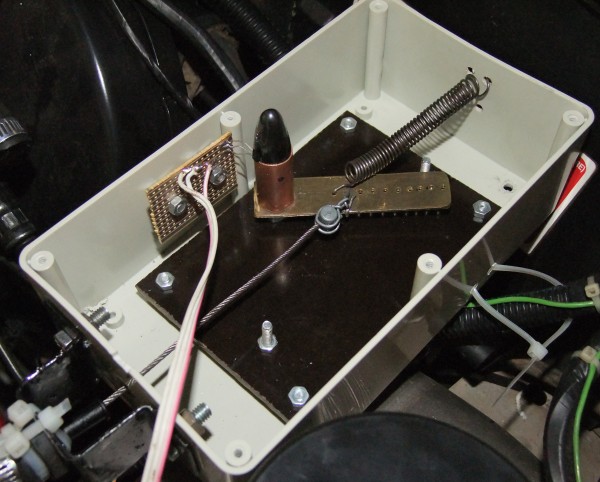
Hall Effect Transistors are often used together with a magnet to detect the Accelerator Pedal position. The electronic circuit for this method is quite simple, but the mechanical construction needs to be very accurate due to the fact that the physical distance over which these sensors work is in the order of a millimeter or two. The picture below shows a hall effect sensor IC of type UGN3503 used in a Magnetic Sensor Accelerator.
3. Optical Sensor.
Optical Sensor based Accelerators have the same difficulty in the sense that again the mechanical construction needs to be very accurate. This is due to the fact that the light intensity variations must be adjusted over relatively small physical dimensions. These type of sensors are usually non-linear.
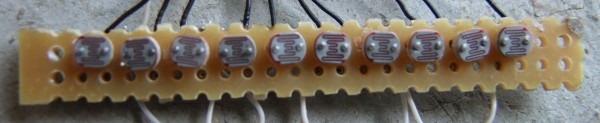
For a Car Accelerator application the Pedal cable moves typically over distances of about 5 cm from zero to full throttle. If this distance is divided in ten equally spaced steps (5 mm), an Accelerator can be made using ten Light Dependent Resistors (LDRs) arranged in a row of about 5 cm in length. The city car EV has 10 batteries with 10 switches which can be controlled by sensing these ten LDRs. (For a more gradually increasing/decreasing accelerator behaviour, a micro-controller may be used to process the signal as required.)
This type of Accelerator is easy to construct (no critical mechanical tolerances), needs no calibration, is linear and is not affected by wear and tear (virtually infinite life).
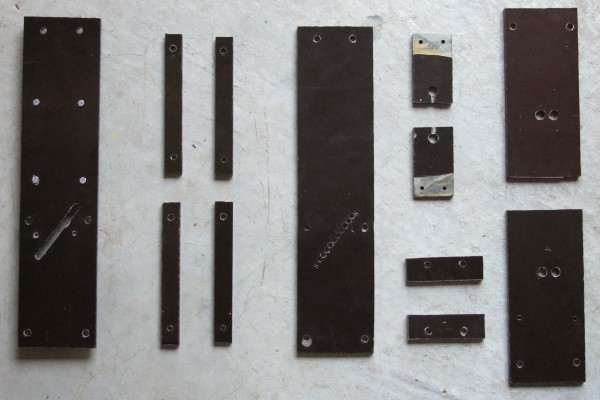
The parts shown in the next picture are made from 4.47mm P1 SRBP bakelite sheet (available from wilec.co.za).
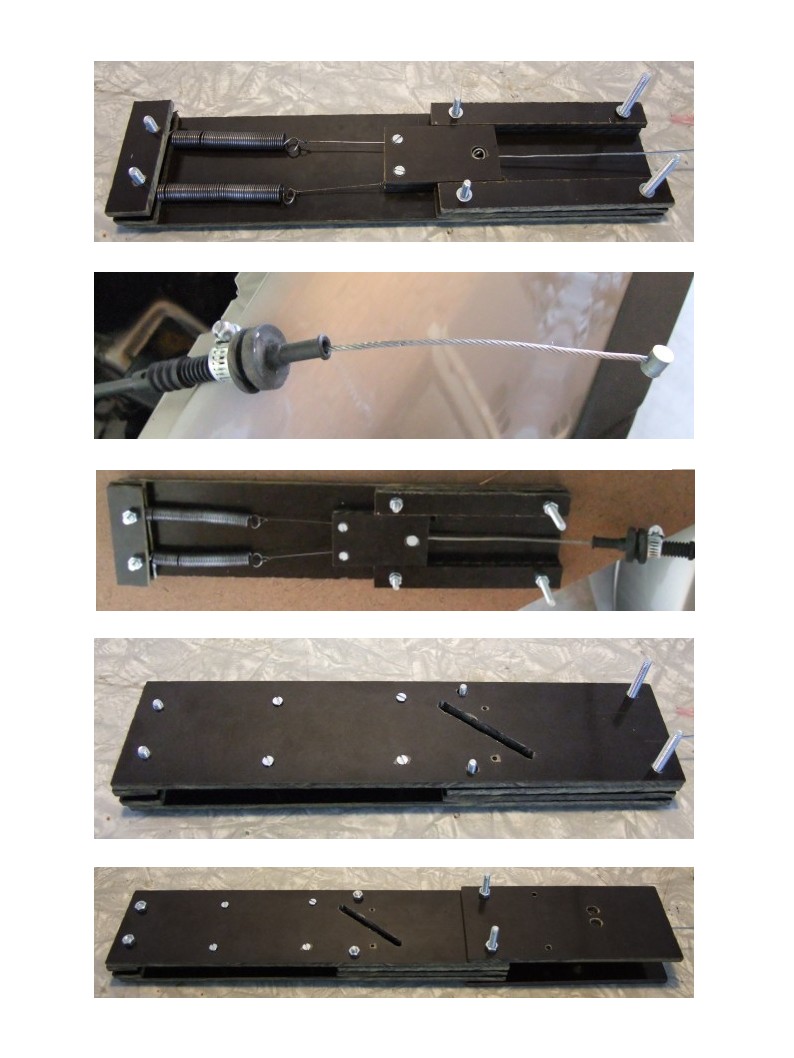
The mechanical construction of the LDR Based Optical Accelerator is shown below:

The 10 LDRs are fitted to a veroboard strip as shown
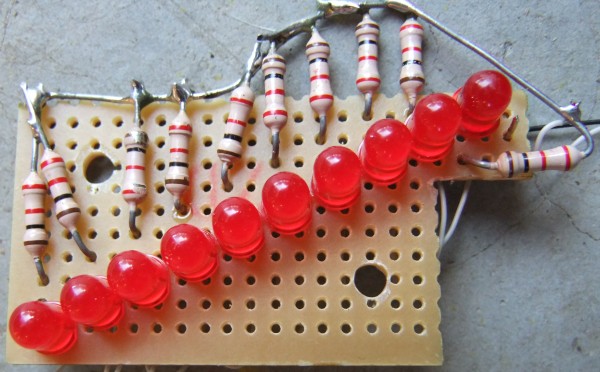
10 LEDs, to be used as light source, are soldered onto a veroboard as shown.
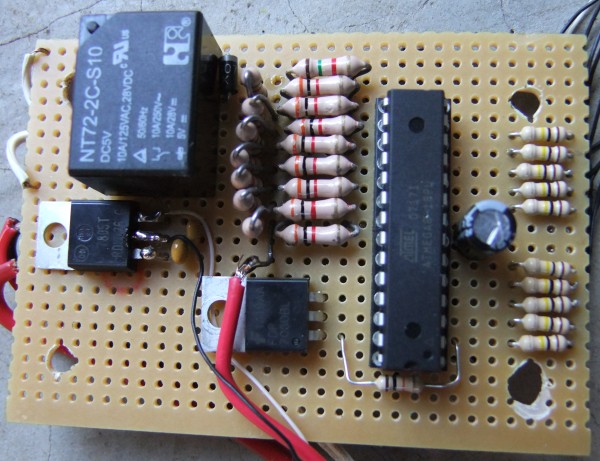
The micro controller components are soldered onto a piece of veroboard as shown
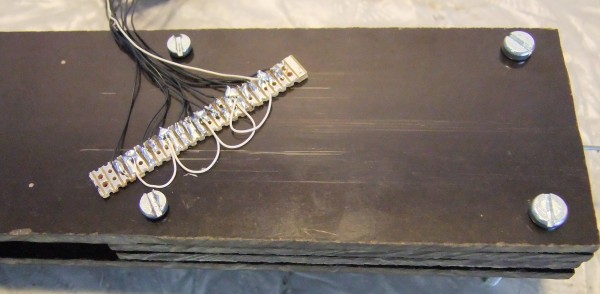
Fit the LDRs to the Accelerator Frame as shown
Fit the LEDs and Micro Controller Board to the Accelerator Frame as shown

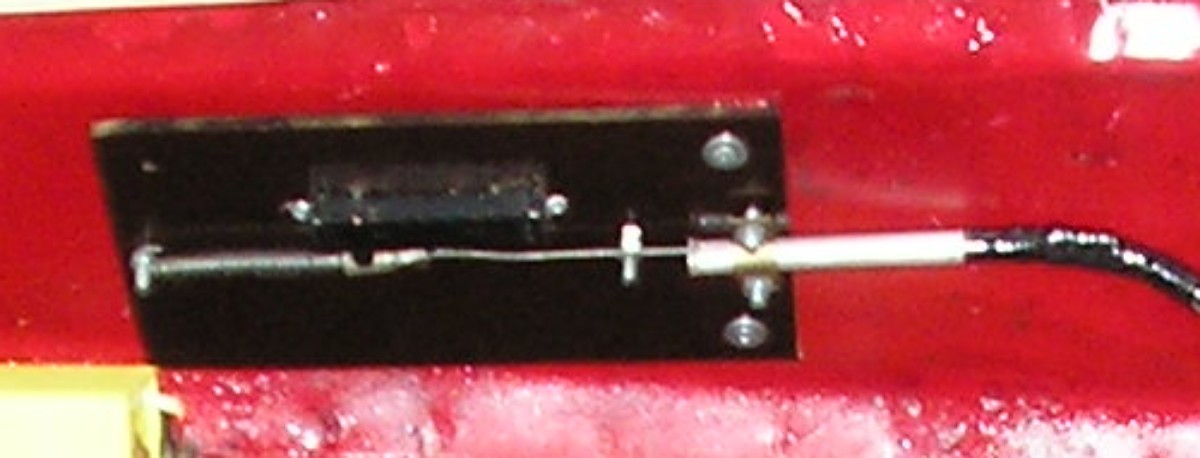
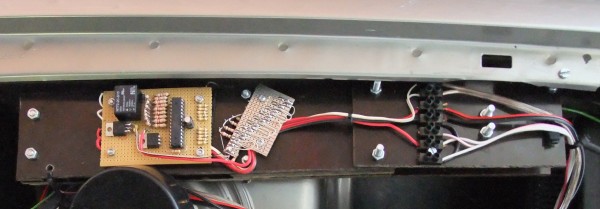
The next picture shows an installed LDR Optical Accelerator.
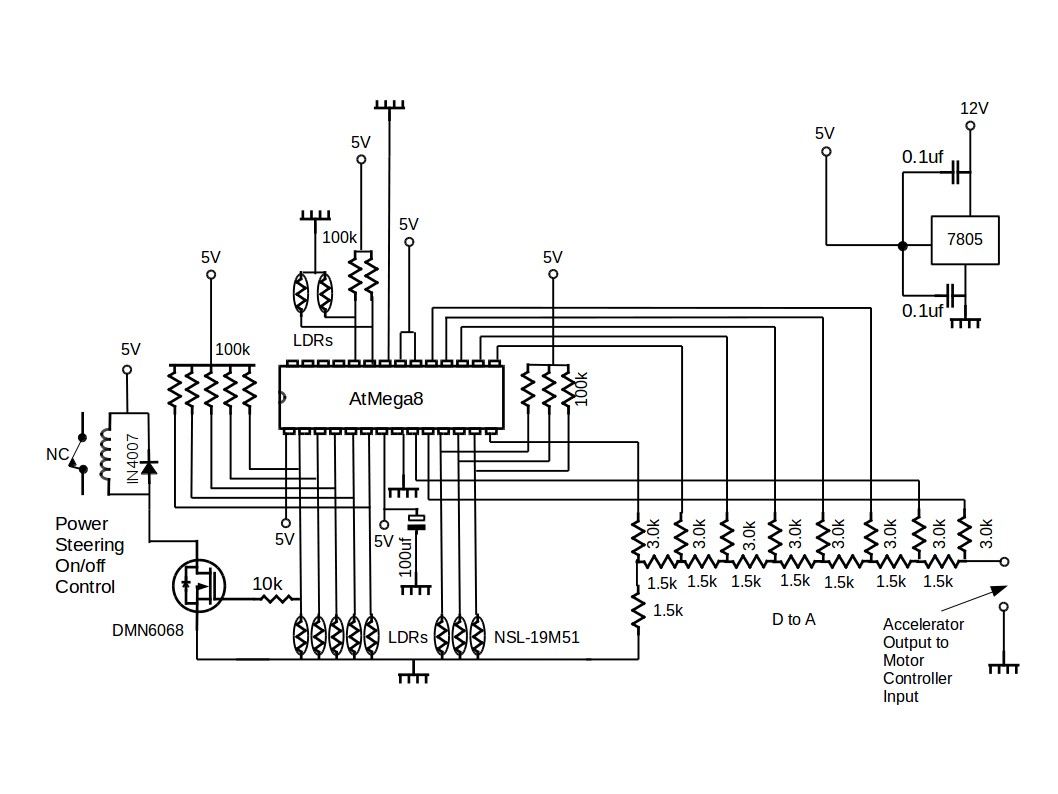
The circuit diagram for the LDR Optical Accelerator is shown below
The software program was created and compiled with BASCOM AVR and the programmer used is the USB-ISP programmer, both available from www.mcselec.com
The program listing is given here: