
This DIY current sensor is based on the A1302 Hall Effect sensor. (alternatively a LEM HASS 300-S current sensor may be used.
The sensor is soldered onto a piece of Vero-Board. See picture below:

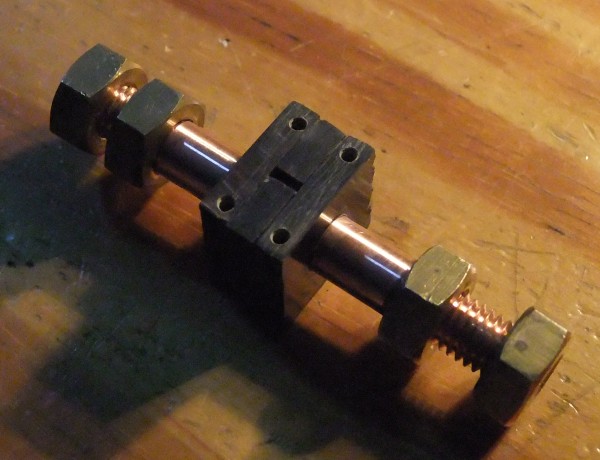
A housing is made of bakelite board and a 10mm copper rod is fitted tightly into a hole drilled in the centre of the housing . The two ends of the rod have thread for M10 brass nuts. A slot is provided in the centre Bakelite piece, for sliding in the Hall Effect sensor. See next picture:
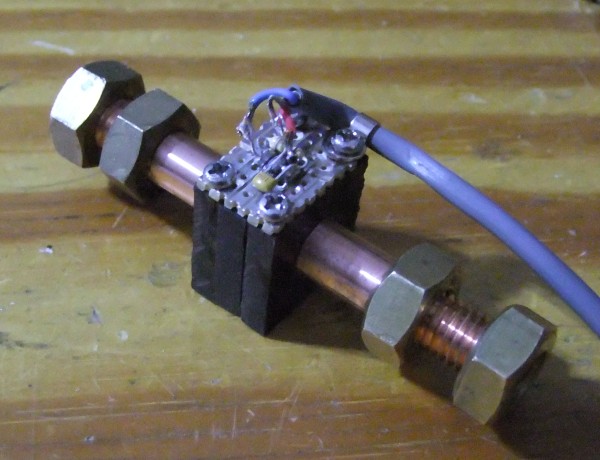
The sensor, together with its resistor and de-coupling capacitor is soldered onto the vero-board and fasened to the bakelite housing with non ferrous self tapper screws. See picture below:
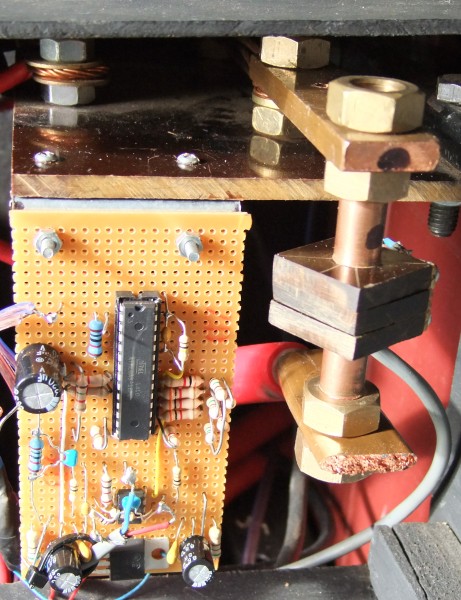
The current sensor is mounted at the positive terminal of the main EV battery, as shown:
The Current Sensor circuit diagram is shown below:
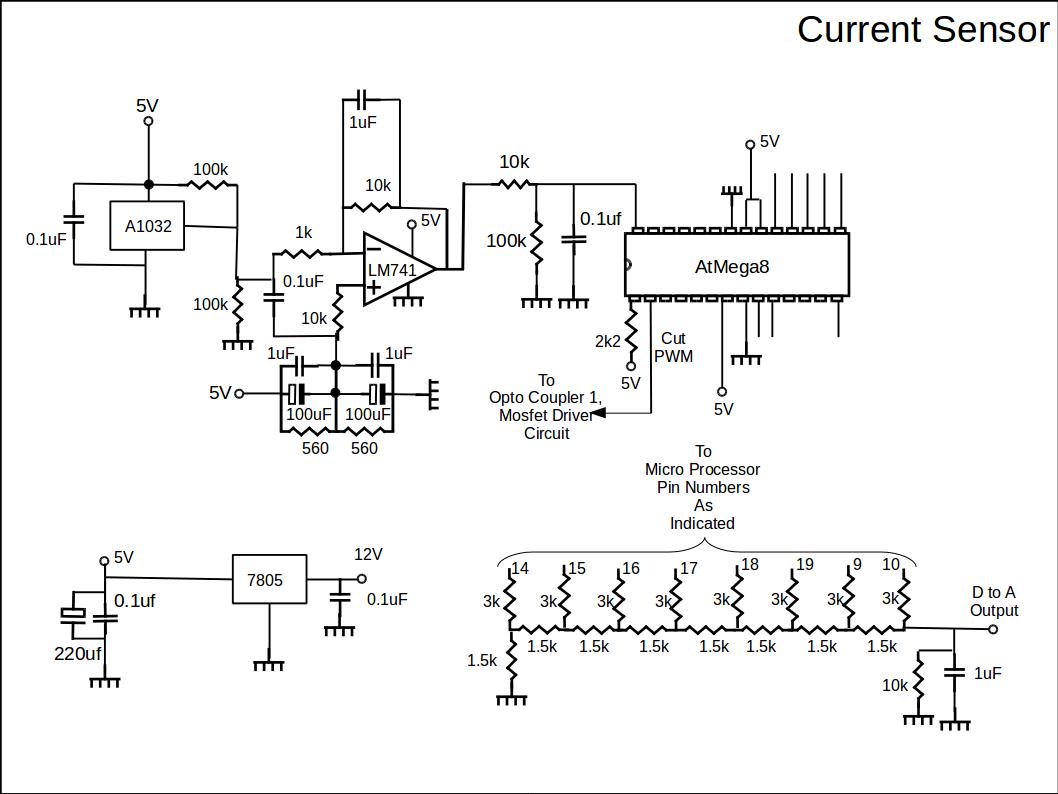
The D to A Output is fed to the Parameter Display (see Parameter Display menu item).
A one second disable discrete signal is provided to cut the PWM when over current occurs.
A current limit can be set in the software. (Calibrate with external Ampere Meter)
Due to the clutchless design, the initial currents through the motor may be extremely high. This occurs at low RPM with low EMF. This over current sensor circuit is used to prevent damage to the MOSFETs. The sensor output is amplified and fed to the Micro Processr. The current limit is set in the software, e.g. 300A. The PWM signals to the Mosfets can be cut for e.g. 1 second (time penalty is programmable in the software) by activating a disable discrete output to the “Opto Coupler 1, Mosfet Driver” circuit.
The PWM Micro Processor is based on the ATmega8 processor.
The program is written in Basic Language. The listing is given below.
The program was created and compiled with BASCOM AVR and the programmer used is the USB-ISP programmer, both available from www.mcselec.com